Communication system |
|
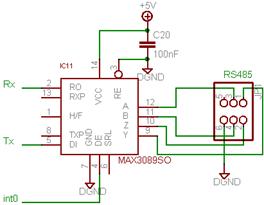
Table of contents The microcontroller will compute the data and send the result trough a liaison RS485. The conversion will be done by the RS485 transceiver. This way allows communicating with the outside (PC or robot) and return the requested value. The ADC and the microcontroller use the SPI port to receive and to send the data between them. We also use the SPI port to load the program on the microcontroller by a stk500 card. This port uses the pins MISO and MOSI of the CPU.
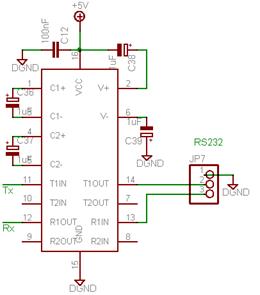
Figure 19:RS485 and RS232 communication |