The power supply |
|
Table of contents Navigation’s system has been designed for the SMR and the MMR. For that reason, it will be supply by a 12V (SMR) or of 24V (MMR) battery. Consequently, we need to develop a power supply unit that will handle these two cases. 11.1. RequirementAll components but the flip coil that we choose can be supply by a 5V voltage. Indeed, to work correctly, the Set / Reset coil driver requires supply voltage between 16V and 20V. Consequently, from a 12V or 24V, we have to supply a voltage of 5V and another one between 16V and 20V. 11.2. Solution suggestionsTo fulfill this requirement, we envisaged the following possibilities: 11.2.1. Suggestion 1The first idea was to develop a conversion’s system for each robot. The first one converted the 24V to 5V and the voltage for the coil compensation will be get directly to the battery. The second one converted the 12V to 5V that will be then converted to 20V.
Figure 20: Suggestion 1 This solution present more disadvantages than advantages. This system will require two separated inputs and three converters that will occupy a lot of place on the circuit and that are expensive. 11.2.2. Suggestion 2Another solution is to do every time two conversions as illustrate the Figure 21:
Figure 21: Suggestion 2 In this configuration, it is possible to externalise the 24V to 12V converter. We would then have only one input plug. Nevertheless, this type of conversion will not be efficient: to get the 18V from the MMR, the 24V has first to be converted to 12V. In addition, this solution presents the same problem of the previous suggestion: Use of three expensive DC/DC converters on a small printed board 11.2.3. Suggestion 3A third solution is to gather the two systems to economise one conversion and to reduce the cost and the place occupied by the supply circuit.
Figure 22: Suggestion 3 The principle of this operating system is almost same as the suggestion 1 but with only two converters. A 24V regulator, which is less expensive than a converter will replace the third one. The conversion is almost the same when we use the SMR. Instead of converting the voltage of the battery in 5V, we first convert it to 18V (to supply the coil driver). The regulator is then also use to protect the circuit against the voltage variation of the battery (it can vary between 21 and 29V). The disadvantage of this circuit is it requires two plugs (one for each robot) and that the efficiency would be low for the MMR: the regulator will dissipate 6V every time. 11.2.4. Suggestion 4The last possibility is to have only one conversion’s system that commutes according to the input voltage.
Figure 23: Suggestion 4 This circuit directly converts the input voltage of the SMR or the MMR in 5V. The supply voltage is then compared to 16V (the minimum voltage requires for the coil driver). If it is not sufficient, a second converter is switch on to provide the necessary voltage. A last advantage of this suggestion is that the whole system could also be supplied by 5V. This solution appears as the best solution: it will just need one converter and one input plug. 11.3. Selection of the componentsThe two last configurations have been privileged to realise the power supply circuit because they require fewer places on the board. The DC/DC converters are the biggest components of the system and the dimension of the PCB is limited to 80 mm by 100 mm. For the configurations 1 and 4, we need a system to convert for the SMR the 5V to a voltage superior to 16V. In the application note[2] of the magneto-sensors, it is suggested to use the MAX662 for the 5V to 20V conversion. This component usually provides 12V, but in a specific configuration, we can get 20V. Its price is cheap (inferior to 5$) and avoid to buy a true 5V to 20V converter which is more expensive. It is also for this reason that the solutions 2 and 3 have been abandoned: we did not found a cheap converter that realizes directly the conversion 12 to 24V or 12 to 18V. Then, the next choice concerns the way to obtain the 5V output from 12V and 24V. We have selected the products of two companies.
Table 10: DC/DC converters from C&D TECHNOLOGIES The first one provided the different DC/DC converter for a great part of the robots in IAU. Consequently, they have proved the quality of their components. Precisely they use the NDY series that offers a good efficiency (82%) and a wide input range (18-36V or 9-18V). This component can be implemented on the suggestions 1 and 3. We have looked for another series less expensive. We have found the NME series (80Kr for each). The efficiency is closed to the NDY series but the input range is narrower and the output current is low for our application: We may need 3*50mA for the compensation coil of the magneto sensor. We found a third companies available on the Farnell supplier. They present a series of component with interesting characteristics:
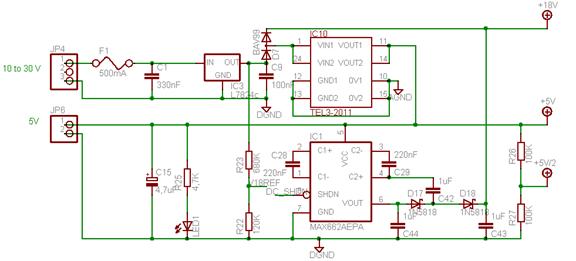
Table 11: DC/DC converters from TRACO POWER The cost to realize the suggestion 1 will be more expensive than with the previous converter. Nevertheless, the TEL 3-2011 converter has a wide input range to design the last suggestion. To conclude the last solution appeared as the best for the price, the size and the power consumed. 11.4. Design of the systemA 24V regulator and a 500mA fuse are used to protect the system. The L7824C regulator (already available at IAU) guarantees a fixed output voltage close to 24V from an input voltage in the range 27-38V. In addition, two diodes have been included: · The first one between the regulator and the converter to avoid negative voltage · The second one between the 20V and the input of the Tel3-2011 to use this last one only if necessary We also added different capacitors to stabilise the supply voltage as well as a diode to signify that the system is 5V powered. The 5 to 20V conversion is assured by the MAX662AEPA.
Figure 24: Power supply unit A comparator between the voltage V1 and V2 (realised with a LM307N amplifier) commands the conversion. V1 = VSupply/4.5 V2 = Vcc/2 The microcontroller could also be used to make that comparison (see Figure 24: Power supply unit). To avoid confusing the two input plugs, we have implemented two different connectors: -A connector with two pins for the 5V supply (facultative) -A connectors with three pins for the other voltage We now have the two voltage needed to supply the flip coil driver and the reset of the components. |